Akademie CNC obrábění (83)
V předchozích dílech tohoto volně struktorovaného seriálu byla věnována pozornost třískovému obrábění soustružením, vrtáním i frézováním. Poněvadž se jednalo o NC programování a případnou výrobou na CNC strojích nebo centrech, byl rovnou uvažován pohyb řezného nástroje v jednotlivých souřadných systémech (nejčastěji v kartézském souřadném systému). Poněvadž již také byly vysvětleny rozdíly např. mezi obráběním na frézkách s 3 + 2 osami a mnoho dalšího, bude dnešní díl jen dále rozšiřovat povědomí o souvislostech mezi jednotlivými framy a kinematickými transformacemi.
Tento díl je tedy možno považovat za stručné seznámení s funkcemi, které jsou užívané řídicím systémem Sinumerik pro prostorovou orien taci (posunutí, otočení, zrcadlení atd.), poněvadž znalost těchto funkcí je vhodná nejen pro dílensky orientované či ISO programování, ale rovněž pro kontrolu či úpravy postprocesingu CAM softwarů.
V úvodu je tedy vhodné ještě uvést běžně užívané souřadné systémy:
- MCS (MKS): Souřadný systém stroje
- BCS (BKS): Základní souřadný systém
- BNS: Základní souřadný systém počátku (nuly)
- ENS: Nastavitelný počátek systému
- WCS (WKS): Souřadný systém obrobku
Např. pomocí kinematické transformace se MCS převádí na BCS (obr. 1) a pokud žádná kinematická transformace není aktivní, tak BCS odpovídá MCS. Základní frame zajišťuje zobrazení BCS do BNS a aktivovatelný nastavitelný frame G54...G599 převádí BNS do ENS. V neposlední řadě je ještě vhodné podotknout, že prostřednictvím programovatelného framu je definován WCS, který představuje základ pro NC programování. Poněvadž se však stále častěji používají koncepce obráběcích strojů, které nemají jednotlivé lineární osy vůči sobě v pravém úhlu a které mají i kruhové osy, užívají se pro zobrazování souřadnice naprogramovaných ve WCS do reálných pohybů os stroje kinematické transformace.
Základní souřadný systém (BCS) se skládá nejen ze tří os, které jsou vůči sobě v pravých úhlech, ale i z dalších os bez vzájemného geometrického vztahu. Jestliže však hovoříme o stroji bez kinematické transformace, jsou systémy BCS a MCS identické. Jestliže se systém BCS s kinematickou transformací matematicky zobrazuje na MCS, nejsou systémy BCS a MCS identické.
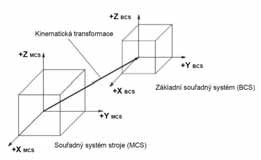
Obr. 1: Kinematická transformace mezi MCS a BCS
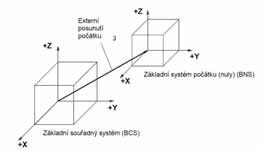
Obr. 2: Externí posunutí počátku mezi BCS a BNS
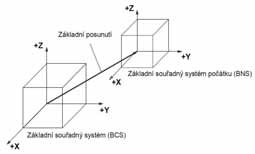
Obr. 3: Základní posunutí počátku mezi BCS a BNS
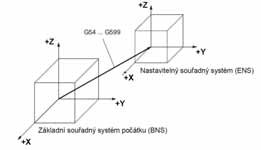
Obr. 4: Nastavitelný frame G54...G599 mezi BNS a ENS
Základní souřadný systém počátku (nuly) neboli BNS vzniká složením základního souřadného systému (BCS) a základního posunutí (obr. 3). Základní posunutí tedy popisuje transformaci souřadnic mezi systémy BCS a BNS. Základní posunutí se skládá z externího posunutí počátku (obr. 2), posunutí DRF (Pozn.: Posunutí DRF umožňuje nastavování aditivního inkrementálního posunutí počátku (nuly) pro geometrické a doplňkové osy v základním souřadném systému pomocí ručního kolečka.), superponovaného pohybu, řetězce systémových framů a řetězce základních framů. Nastavitelný souřadný systém (ENS) je souřadným systémem obrobku WCS s programovatelným objektem typu FRAME. Počáteční nula souřadného systému obrobku je tedy definována nastavitelnými framy G54...G599 (obr. 4).
Jednotlivé framy mají programovatelné složky. Ale co to vlastně ten FRAME je? Frame představuje uzavřený matematický předpis, který v NC programu převádí kartézský souřadný systém na nastavitelný souřadný systém (ENS). Takovýto frame je možno považovat za datovou strukturu, která obsahuje hodnoty např. pro:
- hrubé posunutí (TRANS, ATRANS, CTRANS, G58)
- jemné posunutí (CFINE, G59)
- otočení (ROT/ROTS, AROT/AROTS, CROTS)
- změna měřítka (SCALE, ASCALE)
- zrcadlové převrácení (MIRROR, AMIRROR)
Rozdíl mezi funkcemi pro hrubé a jemné posunutí spočívá za běžných podmínek v možnostech seřizovače stroje (seřizovač má větší pravomoc, proto může zapsat větší hodnotu posunutí) a obsluhy, která má zpravidla pravomoc jen jemně korigovat seřizovačem nastavené hodnoty. Obě tyty posunutí se však v celkovém řetězci sečítají a tvoří tak celkové posunutí. Detailněji pak můžeme napsat, že:
- funkce TRANS X... Y... Z... je absolutně vztažena na aktivní nastavitelné posunutí počátku
- funkce ATRANS X... Y... Z... je aditivní a přičítá se k naposledy programovanému absolutnímu posunutí počátku
- funkce TRANS maže programovatelné posunutí pro všechny osy
- funkce CTRANS umožňuje zápis hrubého posunutí do systémového framu a
- funkce CFINE umožňuje zápis jemného posunutí do systémového framu.
Další výše naznačenou skupinu funkcí je možno charakterizovat detailněji takto:
- funkce ROT umožňuje absolutní otočení v prostoru vztažené na aktivní posunutí počátku G500, G54...G599
- funkce RPL zajišťuje otáčení v definované rovině G17, G18 nebo G19
- funkce AROT je pro aditivní otočení v prostoru vztažené na aktivní posunutí počátku G500, G54...G599
- funkce ROTS je pro absolutní otočení s prostorovými úhly vztažené na aditivní posunutí počátku G500, G54...G599
- funkce AROTS je pro aditivní otočení s prostorovými úhly vztažené na aktivní posunutí počátku G500, G54...G599
- funkce CRPL je pro konstantní otočení v rovině a
- funkce CROTS a CROT jsou pro zápis absolutního otočení ve formě prostorového úhlu nebo po osách (RPY, Euler) do systémového framu.
Avšak více informací se do tohoto dnešního dílu již opravdu nevejde.
Ing. Aleš Polzer, Ph.D.
Článek vznikl za spolupráce ÚST, FSI VUT v Brně s redakcí Technického týdeníku.