Představte si robota, který je současně jezdícím vozidlem i létajícím dronem. ATMO z Caltechu to dovede a transformace mezi těmito konfiguracemi zvládá během cesty kdykoliv podle aktuálních potřeb.

Název pozoruhodného robota ATMO je akronymem pro Aerially Transforming Morphobot, tedy „ve vzduchu se transformující morfobot“. Inženýři kalifornského Caltechu na něm pracují delší dobu, přičemž navázali na technologii svého předchozí transformujícího se robota M4 (multi-modal mobility morphobot).
ATMO létá jako vcelku obyčejná kvadrikoptéra. Když přistává, rotory se sklopí do polohy kolmo k zemi, čímž se z nich stanou čtyři kola, po nichž se ATMO bez potíží přepravuje po pevné zemi.
Důmyslný design takového řešení, o nějž usilovaly i řady konstruktérů dříve, mívá zpravidla slabé místo. Pokud takový robot operuje v reálném terénu a přistává v místě s kameny, většími terénními nerovnostmi, rozsáhlejší vegetací nebo s jinými překážkami, nastává často problém při sklápění rotorů. A nejde jen o terén a jeho části, které se navíc proudem vzduchu rozvíří. Všechny létající prostředky čelí v blízkosti země složitým silám, a to i běžný vrtulník. Když se blíží k přistání, jeho rotory tlačí dolů velké množství vzduchu. Ten se zčásti od země odráží zpět nahoru, a pokud vrtulník přistává příliš rychle, může být vtažen do víru vytvořeného tímto odraženým vzduchem, což způsobí, že ztratí vztlak.
Jedním z možných řešení je přistávat v letové konfiguraci tak, aby rotory už byly téměř sklopené do podoby kol. A přesně tak to dělá i ATMO. Není to ovšem snadné. S tím, jak se mění úhel vrtule, se mění i letové vlastnosti.
Aby vědci lépe porozuměli výše naznačeným složitým aerodynamickým silám, provedli testy v laboratoři dronů Caltech CAST (Center for Autonomous Systems and Technologies — Centrum pro autonomní systémy a technologie). Použili takzvané experimenty se snímači zatížení, aby zjistili, jak změna konfi gurace robota při přistávání ovlivňuje jeho tahovou sílu. Provedli také experimenty s vizualizací kouře, aby odhalili základní jevy, které k takovým změnám v dynamice vedou.
Tvůrci robota pak na základě těchto zjištění museli použít zásadní inovaci v podobě speciálně navrženého algoritmu, jenž změny vyvolané terénem kompenzuje průběžnou změnou tahu jednotlivých rotorů. Díky tomu je ATMO schopen přistávat s vrtulemi již téměř sklopenými a ihned po přistání vyrazit jako čtyřkolové vozidlo. Celá transformace se spoléhá na jediný motor, který pohybuje centrálním kloubem, jenž zvedá rotory do letového režimu dronu nebo je sklápí do režimu jízdy vozidla.


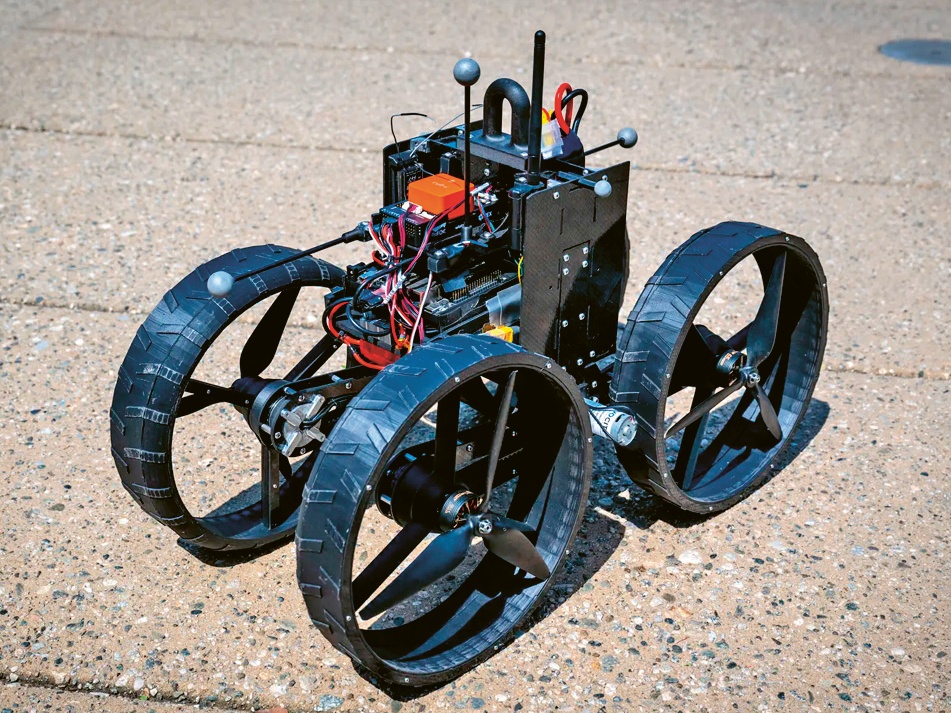
ATMO — robot transformující se ve vzduchu z létajícího dronu v pozemní vozítko a zpět pomocí stejnosměrného motoru a pohonných řemenů; 22,2V lithiumpolymerový akumulátor; 4 rotory opatřené pneumatikami; rozměry 16 × 65 cm (v × š, v letové konfiguraci); hmotnost 5,5 kg
Jak uvádí student Ioannis Mandralis, vedoucí vývoje robota, jde o nový typ dynamického systému pro pohyb. Když robot morfuje, velmi rychle a výrazně se mění fyzikální síly, které na robota působí. Ovládací systém musí s těmito změnami počítat a reagovat na ně. Mandralis s kolegy to nazývají model prediktivní kontroly, který průběžně předvídá, jak se bude ATMO chovat v nejbližších okamžicích, a řídí ho tak, aby letěl plynule. „Schopnost transformovat se ve vzduchu otevírá spoustu možností pro zlepšení autonomie a robustnosti,“ říká Mandralis.
Tvůrci stroje přiznávají, že se inspirovali v přírodě. Nastavení těla v průběhu vzletu a přistání mění například ptáci, přizpůsobují se tak momentální situaci během manévrů, kdy je nutno přizpůsobit se místu nebo se třeba vyhnout překážce. Musejí vlastně dělat totéž, co algoritmy robota ATMO, tedy kompenzovat změny působení fyzikálních sil, které při tom zažívají.
Foto: Caltech